| |
 |
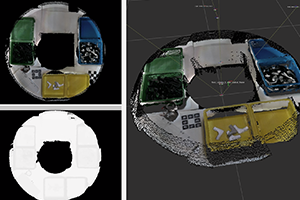
Advanced AI perception for world understanding |
| Despite using inexpensive camera hardware, our robotic systems are still able to understand the world around it by leveraging powerful computer vision algorithms. Based on the RGBD images, our system constructs accurate 3D models of the environment that are used for motion planning and perception. |
 |
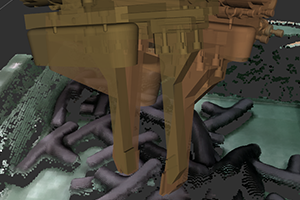
| Context aware and collision free grasping |
| The system supports both suction grippers and parallel grippers, which makes it applicable for picking objects of complex shapes. As importantly, our object grasping technology enables robots to pick specific target objects from the cluttered environment, ensuring that the planned grasps are not in the collision with surrounding objects and obstacles. |
 |
|
| Object detection and pose estimation |
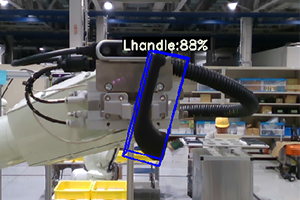 |
Our advanced deep neural networks are able to recognize different objects in images, as well as estimate their accurate 6DoF pose in the real world. Trained entirely on the large corpus of diverse synthetic data, the robust system can handle different environmental conditions in the real world. Deep neural networks are optimized to offer real-time performance and high accuracy. |
| Simulation and synthetic data |
 |
An in-house built simulator produces realistic looking synthetic RGBD images that are used to train deep learning models. It is scalable over on-premise or cloud-compute, delivering great flexibility in speed of data generation. Synthetic data is generated from an object CAD model which assures the object's correct visual appearance from every angle. |
|
|
|
